
Educational Projects

Truss Design/Build Competition
Goal:
Team Role:
During this project I had a large part in the construction of the actual truss. I used a hacksaw and a drill press to cut the bars of foam to length and drill holes where necessary. I also wrote and edited most of the comprehensive report.
Process:
First I researched different truss designs and picked several that I thought would work the best. I brought these to a group meeting where we all presented our ideas and collaborated to create a truss design different from most we've seen before.
The team then constructed the truss and brought it to the competition where it was able to support 47 lbf before failure.
Fall 2016
Solution:


Burro-Bot Rescuer
Goal:
Create a robot which can navigate a mock underground course, detect and aid trapped humans, and then return to where it began.
-
Robot should be programmed with Arduino
-
Robot should operate autonomously
Team Role:
My role in this project was to design the storage hatch and assemble it to the servo motor and to the robot. I prototyped different compartments and presented them to the group to decide on one.
Spring 2016
Solution:
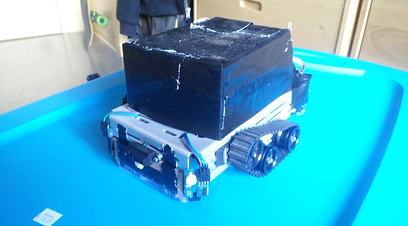
A robot with treads allowing the robot to navigate rocky terrain, an infrared sensor to detect human presence, RGB sensor to detect the course and find the goal area.
Process:
The whole group researched underground navigating robots to see what was already on the market. Then we came up with ideas for what we wanted our robot to do. Once we decided on a problem statement, we divided the tasks between team members and held team meetings where we updated each other on the progress of our tasks.

Sumo-Robot Competition
Fall 2015
Goal:
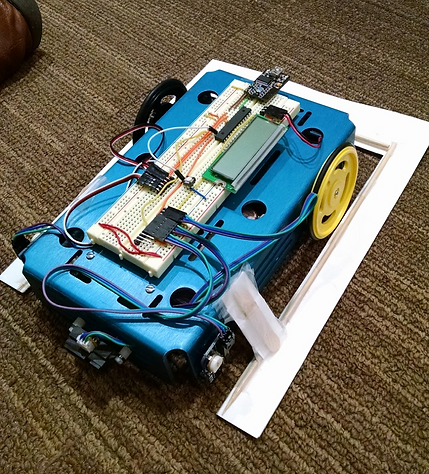
Design and program a robot using the given breadboard, chassis, wheels, sensors and motor components to survive a "sumo" match.
-
Round 1: Robot should be programmed in Arduino strategically so to stay in the ring longer than the opponent
-
Round 2: Robot's programming can be updated and additional design components can be implemented
Team Role:
The group for this project consisted of three members. We didn't necessarily assign roles to one another, but instead worked on each part of the project together including the strategy, coding, design, and construction. This was my first engineering project, so I was new to almost every component of this project. This was a great learning experience for me and I had a lot of fun working on it.
Solution:
Round 1:
Round 2:
For the first round of the sumo competition, the students were only allowed to program their front, right, and left sensors. My team guessed that a lot of groups were probably going to program their robots to detect something in front of them and charge forward. We decided to take an defensive approach and instead detect something in front of us and turn around, hoping the other robot would eventually be tricked into leaving the ring. Unfortunately this didn't work out as planned since we didn't have any rear sensors and were unable to back away from opponents coming at us from behind.

In the second round of the sumo competition, the students were allowed to add design components that would help win the sumo match. Despite our offensive strategy not working out as planned in the first round, my team again took an offensive approach. Many of the robots were coded to detect white and turn around in order to stay inside of the sumo ring. With this in mind, my team decided to design a white exterior ring to protect us from opponent coming from any angle besides the front. We left the front open so that we could still make contact with other robots only by charging forward at them. The ring was made out of several layers of paper, balsa wood, popsicle sticks, and tape. We also added weight to the underside of our robot with coins, so that when we charge at our opponent we were pushing with greater force.
As you can see in the image to the left, our smaller but smarter robot was able to beat out an opponent with intimidating but functionally useless components added to it.